Next: 1.4.4 Model Checking and
Up: 1.4 Research Focus
Previous: 1.4.2 Model Transformation
Contents
Index
DCharts are executable. Every DCharts model has a rigorous semantics
and can be simulated in a simulation environment such as SVM
(Statechart Virtual Machine), which is discussed later in detail.
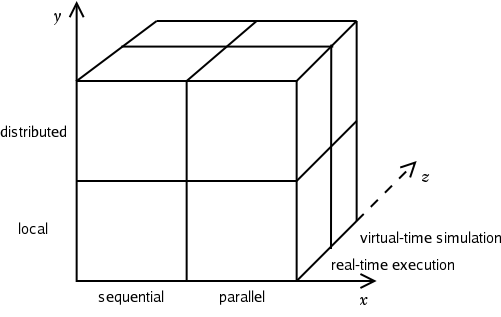
Figure 1.11:
Matrix of simulation and execution
|
|
As an overview of model simulation, Figure 1.11
illustrates the different simulation and execution strategies as a
three-dimensional matrix. The meaning of the axes is described here:
- The x axis indicates whether the simulation (or
execution) is sequential or parallel. Sequential simulation
is step by step simulation that guarantees no overlap of two or
more operations (such as change of states and execution of action
code) at the same time. Parallel simulation, however,
strives to perform operations in a parallel way typically to
maximize performance. Due to the sequential nature of most of the
models, it is very hard to tell which operation can overlap with
another. The overhead of finding out potential overlapable
operations and synchronizing different parallelized parts is
usually so high that the simulation slows down rather than speeds
up.
- The y axis indicates whether the simulation (or
execution) is local or distributed. Local simulation is
done on a stand-alone process. There are three kinds of local
simulation: single-threaded, multi-threaded, and multi-process.
In distributed simulation, multiple processes are involved
in a single simulation. Components participating in the simulation
are deployed among those processes in a modular way. They
communicate with each other by means of messages via a network.
- The z axis indicates whether it is a virtual-time
simulation or real-time execution. Real-time execution is
synchronized with the real time (or wall-clock time). It may need
to satisfy several time constraints in order to guarantee the
real-time behavior of the model. The satisfaction of those time
constraints usually requires support from the underlying operating
system. Virtual-time simulation uses a timer that is
usually not synchronized with the wall clock. If the timer is
proportional to the real time, the simulation is called scaled real-time simulation; if the timer is a counter that keeps
track of the time and it is advanced as fast as possible (i.e., as
soon as all the components are waiting for their scheduled
events), the simulation is called as-fast-as-possible
simulation.
It is important and interesting to know all the combinations of these
schemes, though only some of the combinations are reasonable, and only
some of the reasonable combinations are relevant to this thesis work.
- Sequential local real-time execution. This type of
execution is natively implemented in SVM, the interpreter for
DCharts. All the operations are sequentially executed on a
multi-threaded process. Different threads are synchronized to
guarantee that only one operation is performed at a time.
- Sequential local virtual-time simulation. The two types
of virtual time (scaled and as-soon-as-possible) are not directly
supported by the SVM simulation kernel. However, scaled real-time
simulation can be easily simulated with real-time simulation. This
can be accomplished by redefining the macro that retrieves or
schedules time (with the
 event), as discussed later. The
later part of this thesis also shows that as-soon-as-possible
simulation can be simulated with a clock component (section
9.2). As a result, there is no need to
internally implement this kind of simulation.
event), as discussed later. The
later part of this thesis also shows that as-soon-as-possible
simulation can be simulated with a clock component (section
9.2). As a result, there is no need to
internally implement this kind of simulation.
- Sequential distributed real-time execution. For
distributed execution, it is natural to allow parallel behavior
between components on different computers. Sequential behavior
can be simulated with parallel execution by means of global
semaphores or a global clock component. However, this makes the
execution less efficient than sequential real-time execution on a
single computer (because of latency in the network and the
overhead of synchronization). Because it is rarely useful,
sequential distributed real-time execution is not directly
supported by the SVM.
- Sequential distributed virtual-time simulation. For the
same reason of inefficiency, sequential distributed virtual-time
simulation is not supported. The users should use sequential local
virtual-time simulation instead.
- Parallel local real-time execution. SVM provides
support for multi-process simulation on a single machine. Those
processes are highly parallel. They influence each other in the
form of messages via ports. The execution is real-time so that
each of the processes directly accesses the time given by the
computer hardware.
- Parallel local virtual-time simulation. Virtual time is
not directly supported by SVM. However, with a special clock
component running as a separate process and providing time service
to all the other processes, the two types of virtual-time
simulation are made possible. As a result, there is no need to
implement this kind of simulation internally in the SVM.
- Parallel distributed real-time execution. This kind of
execution directly corresponds to distributed software systems and
is thus interesting. SVM builds parallel distributed real-time
execution on top of PVM (Parallel Virtual Machine)
[10]. Ports are defined on the boundary of
components. Individual components have parallel behavior. They
communicate with messages sent via connections between ports over
a network.
- Parallel distributed virtual-time simulation. This kind
of simulation is simulated with parallel distributed real-time
execution with an additional clock component. The clock component
reveals its ID to all the other components and provides global
timing service to them. This clock component is discussed later in
general.
From this discussion, it is easily seen that SVM is a powerful
simulation tool that supports most of the simulation schemes, though
some are simulated by the others with extra components. The concept of
a clock component is important because it reduces the requirements on
the simulation engine. The simulator is thus minimal and optimizable.
Next: 1.4.4 Model Checking and
Up: 1.4 Research Focus
Previous: 1.4.2 Model Transformation
Contents
Index
Thomas Huining Feng
2004-04-28