
|
PhD Thesis
|
|
|
PhD Thesis
|
A Multi-Paradigm Modelling Foundation for Twinning (within the context of Systems Engineering)AbstractThe purpose of Systems Engineering is to analyse, design, optimize, operate, and evolve complex Cyber-Physical Systems (CPS). This often happens collaboratively and by following complicated workflows. In order to deal with the increasing complexity of CPSs, the domain of Modelling and Simulation allows for system engineers to focus on their specific domain knowledge. Digital Twins (DTs) are simulation models running continually in parallel with a real-world System under Study (SuS) while being fed the same input stimuli as that SuS. They can be used to analyse, optimize and adapt CPSs. Throughout the (currently quite ad-hoc) creation of such Twinning Systems, a plethora of choices impacts the functionality and performance of the realized system, comprised of the actual SuS and its model. This work identifies four stages at which this variability may appear:
To show these stages and their impact, four distinct proof-of-concepts have been created: (1) a simple LEGO Line Following Robot; (2) a pathfinding TurtleBot; (3) the macro-level movement of ships in the Port of Antwerp; and (4) the simple kinematic movement of a 1D vessel. Teaser Figure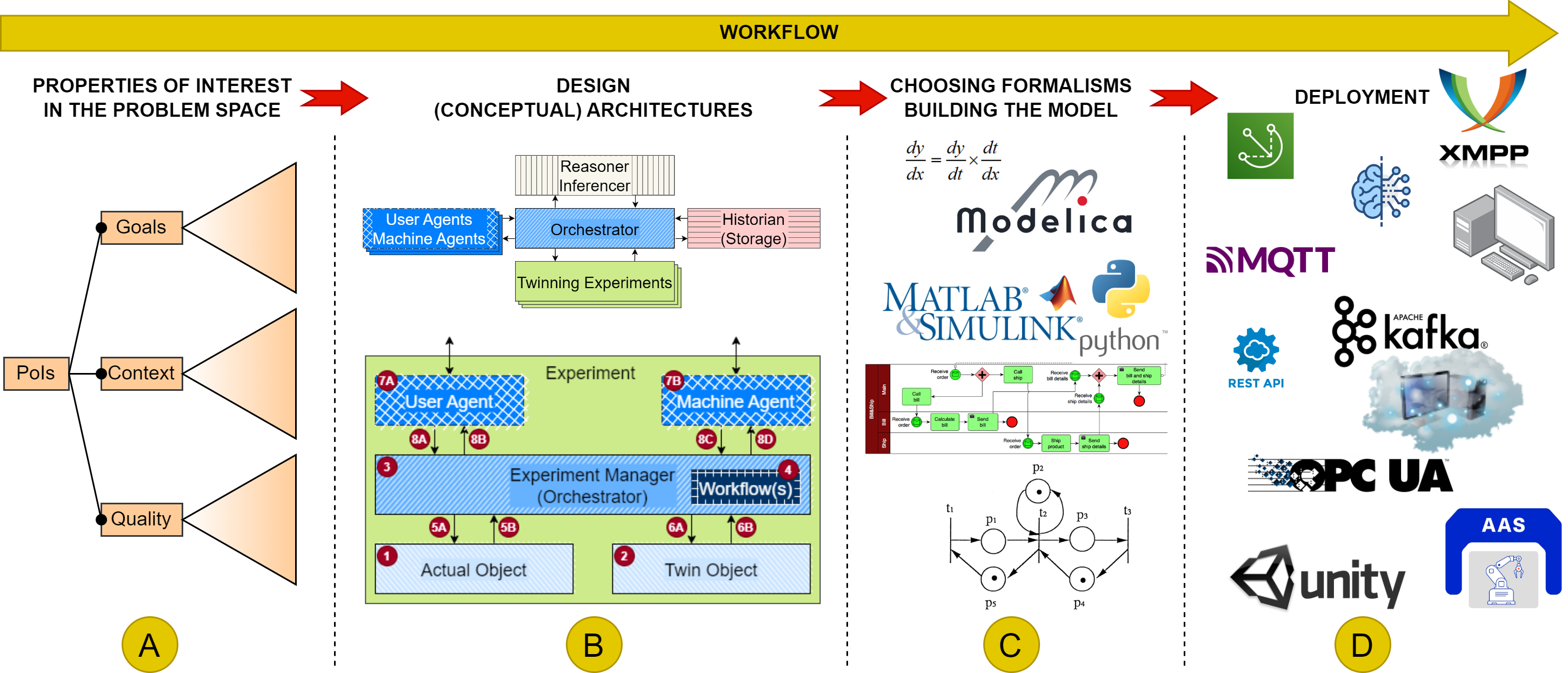
Links |
| Maintained by Randy Paredis. |